传统的AGV
传统的AGV是以电池为动力,装有非接触导向装置和独立寻址系统的无人驾驶自动运输车。由于采用电池供电,传统AGV的功率和行驶距离受到极大的限制,AGV的利用率不高。为了提高AGV的利用率,就必须对AGV的电池进行经常性地充电。为了保证AGV在生产线上不用移出生产过程就可以完成充电,必须在安装整个生产过程系统时,在允许AGV暂停的地方(如分段运输区、转向区和装载停止区等)设置并安装电池充电站,定时、定点对AGV进行充电。AGV车动力电源一般用的是传统的“高倍率开口镉镍电池”,以适应其快速充电和较大电流放电的要求。但受“镉镍电池”记忆效应的影响,使用、维护比较麻烦。同时由于“镉镍电池”中镉的污染,不利于环保。此外,充电站数量的增多,也增加了AGV运输系统的总建设成本。
非接触式供电系统
随着IPT(Inductive Power Transfer)非接触供电技术的发展,IPT非接触供电技术被应用于AGV物流运输系统,极大地改善了目前AGV供电系统的缺陷。新型供电系统可以在AGV不带电池的情况下为小车提供驱动电源和控制电源,也可以在不设充电站的情况下为AGV的电池进行连续或定时充电。但是非接触供电受地下供电电缆限制,不利于进行现场改造,路线柔性变化降低。

非接触式供电系统供电柜能产生高频持续循环的交流电源。供电电缆以两根铺设,一根是输出电流,一根是返回电流,电流呈反向流动。这样能在两根电缆之间形成双倍强烈的磁场,而在两电缆外部没有磁场。通过AGV车体上取电装置(类似变压器原理),将磁场转换电能,并逆变成直流供AGV使用。
应用案例
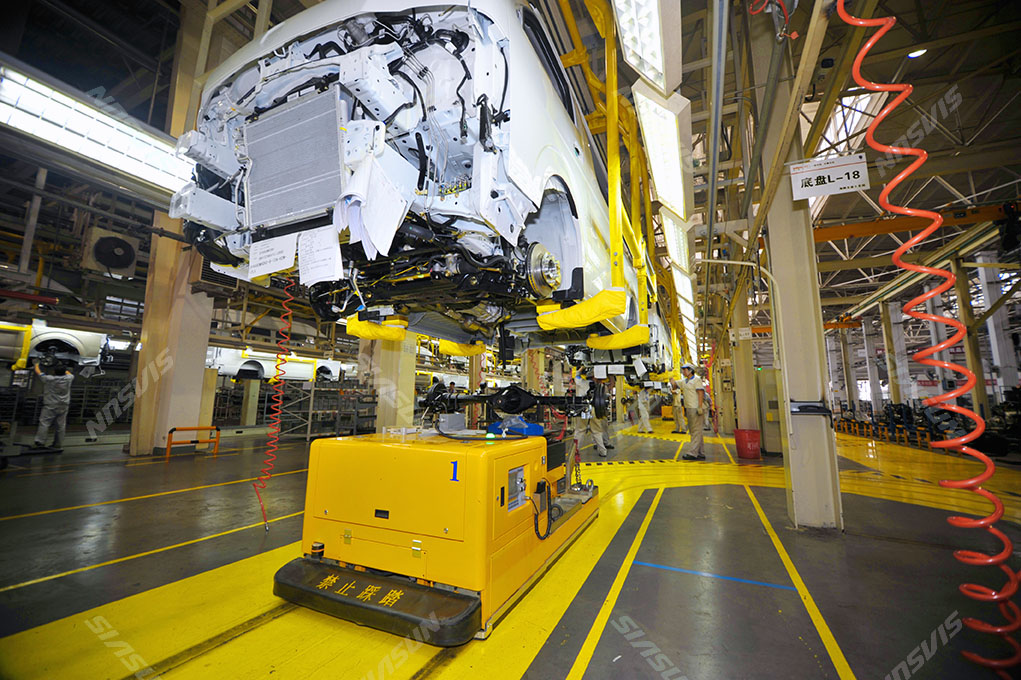
新松公司依据强大的技术优势及创新能力,根据多年的AGV技术积累和应用经验,为沈阳华晨金杯汽车有限公司海狮总装二厂成功实施了非接触式供电的AGV合装系统。该项目一期共设计了一套供电装置供两个环线使用,调度管理4台AGV分别用于发动机总成和后桥总成的合装,以满足一期296s的生产节拍。该系统在满足既有车型的前提下,考虑了将来新增车型的需要。
1.系统构成及各功能
该系统由4台剪式单举升AGV,1套AGV地面供电、导引系统,1套AGV控制台,1套数据采集系统和AGV调度管理系统和通信系统等构成。
(1)AGV AGV完成发动机总成和后桥的装配定位、输送和辅助装配工作。
(2)AGV地面供电、导引系统 地面导引系统是AGV运行的路线和轨迹,通过供电电缆实现电磁导引。
(3)AGV控制台和调度管理系统 AGV控制台和调度管理系统负责数据采集系统的数据处理,与上位机交换信息,生成AGV的运行任务,解决多AGV之间的避碰等问题。
(4)通信系统 通信系统由无线局域网组成。AGV与控制台之间采用无线电台进行信息交换,通信协议为TCP/IP协议。控制台与上位机之间采用以太网进行数据传输。
2.AGV工作过程
AGV控制台通过对射开关检测到输送链上车体的位置信号后,分别调度在等待站点已载有发动机总成(后桥)的AGV按预定时间、速度进入输送链下方,在预定区域捕获预先固定在汽车车身上的合作目标,保持稳定跟踪状态后,人工控制举升,AGV自动打开滑动平台锁销。由装配工人安装固定螺栓,完成装配后人工发出安装结束信号。根据此结束信号,AGV自动落下升降机构后复位,滑动平台自动闭锁,AGV加速离开装配工位,在装载站点装好发动机总成(后桥)后,AGV向控制台发出装载完成信息,AGV按控制台的指令行驶到等待地点,进入下个循环。

AGV控制台根据主装悬挂车体到达的信号向在等待点的合装小车发出行驶信号,若主装配线上是空吊具,则AGV小车仍处于等待状态。当发动机总成(后桥)不能及时供应时,可通过设置在装配工位旁边的输送链急停开关,由人工控制停止输送链运行。当AGV因特殊原因进入报警工位而未完成合装时,AGV系统及输送链报警,输送链同时停线,以完成装配。
3.AGV系统技术指标
AGVS控制方式是控制台集中调度、监控和管理控制。AGV控制方式具备全自动、离线模式和手动功能,通信方式为无线局域网,导航方式为电磁导航,驱动方式为双轮差动。AGV系统最大负载能力为1000kg,运动方向为前、后和转弯行走,最大直线速度为直线60m/min,转弯半径为1.5m,导航精度为±10mm,停车精度为±10mm。AGV系统的防碰装置为激光防碰+接触式保险杠。举升装置为电动剪式举升,举升行程为1000mm,举升力为1t,升降速度为4.5m/min。AGV系统活动平台:X(车长方向)长度为±120mm;Y(车宽方向)长度为±50mm;水平旋转为±2°。该AGV系统采用非接触式供电方式,举升前车体尺寸为2500mm×1200mm×800mm,举升后车体尺寸为2500mm×1200mm×1800mm。

4.AGV车载控制器
新松公司根据当前AGV技术的最新发展形势,结合多年的设计及应用经验,潜心研究,设计出了一款新型嵌入式CAN总线主控制器,该主控制器以工业级嵌入式主机为主计算机,在控制器内集成了主机、电子盘、网卡、CAN通信端口和串口等高速运算主机所需的部件及通信部件,进行独立封装。控制器内部集成了AGV控制所需的最基本的单元,控制器本身无任何扩展插槽,使用简单电源供电,面板上有一个显示器输出端口、一个RJ45网络端口、一个PS/2键盘及鼠标通用接口、两个RS232串口和两个CAN通信端口,控制器底部有带有减振器的安装支架。
运动控制模块MUC50是基于CAN总线通信方式的分布式运动控制器,通过对伺服驱动器的调节,来达到对AGV车体运动的精确控制。每个运动控制器不仅能够控制两个轴的伺服驱动器,还具有16个I/O输入口、8个I/O输出口、4个AD输入口和两个DA输出口。运动控制模块MUC50通过CAN总线与主控制器VCU300进行通信。
分布式设计的MCU50运动控制模块安装简单,各种状态可以通过其上部的状态指示灯直接观察,使维护更加简单。MCU50运动控制模块,在接线方式上采用集中式带锁插头,接线更可靠,不易松动,提高了系统的整体稳定性。
5.AGV车体软件
AGV车载控制器使用Windows CE操作系统,包括AGV车体控制嵌入式软件、车体参数文件、车体工具软件、车体运行地图文件以及记录车体运行状态的黑匣子文件。
(1)AGV车体控制嵌入式软件是基于Windows环境下编辑的软件,可执行多任务的操作,可进行多窗口的动态观察,恢复功能强。在AGV运动的过程中,可通过显示终端,动态地观察AGV的各个设备的工作状态及位置环的反馈信息。当出现急停停车、通信中断或光靶丢失等故障时,无需重新上线,可以在故障解决后立即恢复运行。AGV车体控制嵌入式软件提高了AGV的可维护性,缩短了停线时间。
(2)车体工具软件是AGV调试及故障检修的工具软件。通过AGV工具软件,可以方便地观察AGV输入、输出的状态进而通信状态等。
(3)车体参数文件记录了AGV各设备的参数信息。此参数文件可以通过AGV控制台无线传输更改,也可以在AGV上直接更改。
(4)车体运行地图文件是AGV运行规划的路径信息,随着AGV运行路线的更改,AGV系统只需要调整车体运行地图文件就可以改变AGV运行的环线。
(5)黑匣子文件记录了AGV运行的各个信息,当AGV出现故障时,通过黑匣子文件可以很快地查找出故障的原因。
6.AGV动态合装解决方案
目前汽车合装基本采用连续运转装配方式,在工艺链及车身连续运行下装配(不停线装配)是动态合装的关键。新松公司开发的动态跟踪传感器是采用专用位置的传感器,当AGV进入被装车身下方时,检测到合作目标,AGV通过检测安放在被装车身下方的合作目标上,计算AGV与被装车身间的位置,调整AGV的运行速度,使AGV保持与被装车身同步运行,实现动态合装。
该种方式下,AGV直接与被装车身的位置同步,避免了由于吊具安装、工艺链条节距匹配等原因造成的位置误差,并可对悬链的爬行等问题做出及时反应,是目前最有效的同步跟踪方式。由于跟踪同步是由AGV本体进行独立采样完成的,即使是在AGV手动离线状态下仍能完成动态同步合装工作,因而更具备整体的灵活性。
结语
目前,电池供电AGV在汽车合装领域应用较多,非接触式供电AGV则刚刚起步。在方案考虑充分的前提下,初期一次性布局到位,即使将来产量提高可直接增加AGV数量,而无需对地面二次施工,柔性堪比电池供电AGV。通过金杯现场一段时期的运行来看,该AGV适应性、稳定性是可以满足需求的。同时免去了电池的维护和保养。长期来看,非接触式供电AGV的维护成本还是比较低的。但相关供电、取电装置的成本若能降低,进而降低初期投资,非接触式供电AGV发展应用前景还是比较乐观的。
混合供电和无线充电技术")





